

Simple and efficient interplay between human and quadrupedal robots paves the best way in the direction of creating clever and succesful helper robots, forging a future the place expertise enhances our lives in methods past our creativeness. Key to such human-robot interplay methods is enabling quadrupedal robots to reply to pure language directions. Recent developments in giant language fashions (LLMs) have demonstrated the potential to carry out high-level planning. Yet, it stays a problem for LLMs to comprehend low-level instructions, corresponding to joint angle targets or motor torques, particularly for inherently unstable legged robots, necessitating high-frequency management indicators. Consequently, most present work presumes the supply of high-level APIs for LLMs to dictate robotic conduct, inherently limiting the system’s expressive capabilities.
In “SayTap: Language to Quadrupedal Locomotion”, we suggest an strategy that makes use of foot contact patterns (which refer to the sequence and method through which a four-legged agent locations its toes on the bottom whereas transferring) as an interface to bridge human instructions in pure language and a locomotion controller that outputs low-level instructions. This ends in an interactive quadrupedal robotic system that enables customers to flexibly craft various locomotion behaviors (e.g., a person can ask the robotic to stroll, run, leap or make different actions utilizing easy language). We contribute an LLM immediate design, a reward perform, and a technique to expose the SayTap controller to the possible distribution of contact patterns. We display that SayTap is a controller able to reaching various locomotion patterns that may be transferred to actual robotic {hardware}.
SayTap technique
The SayTap strategy makes use of a contact sample template, which is a 4 X T matrix of 0s and 1s, with 0s representing an agent’s toes within the air and 1s for toes on the bottom. From high to backside, every row within the matrix offers the foot contact patterns of the entrance left (FL), entrance proper (FR), rear left (RL) and rear proper (RR) toes. SayTap’s management frequency is 50 Hz, so every 0 or 1 lasts 0.02 seconds. In this work, a desired foot contact sample is outlined by a cyclic sliding window of measurement Lw and of form 4 X Lw. The sliding window extracts from the contact sample template 4 foot floor contact flags, which point out if a foot is on the bottom or within the air between t + 1 and t + Lw. The determine beneath supplies an outline of the SayTap technique.
SayTap introduces these desired foot contact patterns as a brand new interface between pure language person instructions and the locomotion controller. The locomotion controller is used to full the principle job (e.g., following specified velocities) and to place the robotic’s toes on the bottom on the specified time, such that the realized foot contact patterns are as shut to the specified contact patterns as attainable. To obtain this, the locomotion controller takes the specified foot contact sample at every time step as its enter as well as to the robotic’s proprioceptive sensory information (e.g., joint positions and velocities) and task-related inputs (e.g., user-specified velocity instructions). We use deep reinforcement studying to practice the locomotion controller and symbolize it as a deep neural community. During controller coaching, a random generator samples the specified foot contact patterns, the coverage is then optimized to output low-level robotic actions to obtain the specified foot contact sample. Then at take a look at time a LLM interprets person instructions into foot contact patterns.
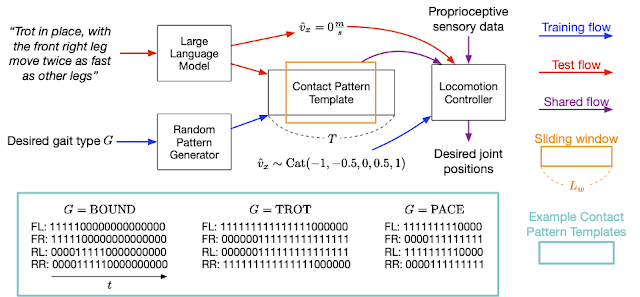 |
| SayTap strategy overview. |
| SayTap makes use of foot contact patterns (e.g., 0 and 1 sequences for every foot within the inset, the place 0s are foot within the air and 1s are foot on the bottom) as an interface that bridges pure language person instructions and low-level management instructions. With a reinforcement learning-based locomotion controller that’s skilled to understand the specified contact patterns, SayTap permits a quadrupedal robotic to take each easy and direct directions (e.g., “Trot forward slowly.”) in addition to obscure person instructions (e.g., “Good news, we are going to a picnic this weekend!”) and react accordingly. |
We display that the LLM is able to precisely mapping person instructions into foot contact sample templates in specified codecs when given correctly designed prompts, even in circumstances when the instructions are unstructured or obscure. In coaching, we use a random sample generator to produce contact sample templates which are of varied sample lengths T, foot-ground contact ratios inside a cycle based mostly on a given gait kind G, in order that the locomotion controller will get to be taught on a large distribution of actions main to higher generalization. See the paper for extra particulars.
Results
With a easy immediate that incorporates solely three in-context examples of generally seen foot contact patterns, an LLM can translate varied human instructions precisely into contact patterns and even generalize to these that don’t explicitly specify how the robotic ought to react.
SayTap prompts are concise and consist of 4 parts: (1) normal instruction that describes the duties the LLM ought to accomplish; (2) gait definition that reminds the LLM of primary data about quadrupedal gaits and the way they are often associated to feelings; (3) output format definition; and (4) examples that give the LLM possibilities to be taught in-context. We additionally specify 5 velocities that permit a robotic to transfer ahead or backward, quick or sluggish, or stay nonetheless.
General instruction block You are a canine foot contact sample professional. Your job is to give a velocity and a foot contact sample based mostly on the enter. You will all the time give the output within the appropriate format it doesn't matter what the enter is. Gait definition block The following are description about gaits: 1. Trotting is a gait the place two diagonally reverse legs strike the bottom on the identical time. 2. Pacing is a gait the place the 2 legs on the left/proper aspect of the physique strike the bottom on the identical time. 3. Bounding is a gait the place the 2 entrance/rear legs strike the bottom on the identical time. It has an extended suspension section the place all toes are off the bottom, for instance, for a minimum of 25% of the cycle size. This gait additionally offers a cheerful feeling. Output format definition block The following are guidelines for describing the speed and foot contact patterns: 1. You ought to first output the speed, then the foot contact sample. 2. There are 5 velocities to select from: [-1.0, -0.5, 0.0, 0.5, 1.0]. 3. A sample has 4 strains, every of which represents the foot contact sample of a leg. 4. Each line has a label. "FL" is entrance left leg, "FR" is entrance proper leg, "RL" is rear left leg, and "RR" is rear proper leg. 5. In every line, "0" represents foot within the air, "1" represents foot on the bottom. Example block Input: Trot slowly Output: 0.5 FL: 11111111111111111000000000 FR: 00000000011111111111111111 RL: 00000000011111111111111111 RR: 11111111111111111000000000 Input: Bound in place Output: 0.0 FL: 11111111111100000000000000 FR: 11111111111100000000000000 RL: 00000011111111111100000000 RR: 00000011111111111100000000 Input: Pace backward quick Output: -1.0 FL: 11111111100001111111110000 FR: 00001111111110000111111111 RL: 11111111100001111111110000 RR: 00001111111110000111111111 Input:
| SayTap immediate to the LLM. Texts in blue are used for illustration and should not enter to LLM. |
Following easy and direct instructions
We display within the movies beneath that the SayTap system can efficiently carry out duties the place the instructions are direct and clear. Although some instructions should not lined by the three in-context examples, we’re ready to information the LLM to categorical its inner data from the pre-training section by way of the “Gait definition block” (see the second block in our immediate above) within the immediate.
Following unstructured or obscure instructions
But what’s extra attention-grabbing is SayTap’s capacity to course of unstructured and obscure directions. With solely just a little trace within the immediate to join sure gaits with normal impressions of feelings, the robotic bounds up and down when listening to thrilling messages, like “We are going to a picnic!” Furthermore, it additionally presents the scenes precisely (e.g., transferring shortly with its toes barely touching the bottom when instructed the bottom could be very sizzling).
Conclusion and future work
We current SayTap, an interactive system for quadrupedal robots that enables customers to flexibly craft various locomotion behaviors. SayTap introduces desired foot contact patterns as a brand new interface between pure language and the low-level controller. This new interface is easy and versatile, furthermore, it permits a robotic to comply with each direct directions and instructions that don’t explicitly state how the robotic ought to react.
One attention-grabbing route for future work is to take a look at if instructions that suggest a selected feeling will permit the LLM to output a desired gait. In the gait definition block proven within the outcomes part above, we offer a sentence that connects a cheerful temper with bounding gaits. We consider that offering extra info can increase the LLM’s interpretations (e.g., implied emotions). In our analysis, the connection between a cheerful feeling and a bounding gait led the robotic to act vividly when following obscure human instructions. Another attention-grabbing route for future work is to introduce multi-modal inputs, corresponding to movies and audio. Foot contact patterns translated from these indicators will, in idea, nonetheless work with our pipeline and can unlock many extra attention-grabbing use circumstances.
Acknowledgements
Yujin Tang, Wenhao Yu, Jie Tan, Heiga Zen, Aleksandra Faust and Tatsuya Harada performed this analysis. This work was conceived and carried out whereas the group was in Google Research and might be continued at Google DeepMind. The authors would really like to thank Tingnan Zhang, Linda Luu, Kuang-Huei Lee, Vincent Vanhoucke and Douglas Eck for his or her helpful discussions and technical assist within the experiments.